3. Geometrische processing
Alle data wordt vervolgens zo snel mogelijk gecontroleerd zodat inzichtelijk kan worden gemaakt of de ingewonnen data compleet is.
3.1 Trajectberekening
Allereerst wordt het gevlogen traject berekend. Daarvoor zijn de volgende gegevens noodzakelijk:
- GPS-IMU gegevens uit het vliegtuig
- GPS-basisstations
De vluchtbewegingen van de scanner worden door de IMU continu gemeten (bijv. 200 keer per seconde). De GPS meet iedere seconde de locatie van het vliegtuig. Deze systemen worden gekoppeld aan de GPS-basisstations op de grond die continue meten en waarvan de coördinaten bekend zijn. Zodoende wordt een traject berekend dat voor iedere meting van de LiDAR weet wat de locatie en de stand van het vliegtuig waren.
3.2 Creëren puntenwolk
In de volgende stap wordt de puntenwolk uitgevoerd. Input voor deze stap zijn de:
- Trajectberekeningen
- Ruwe LiDAR data
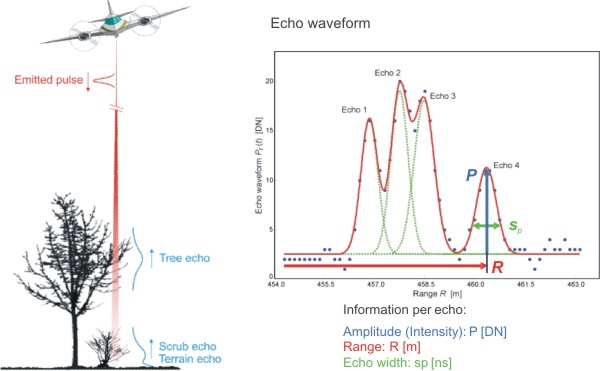
De ruwe LiDAR data wordt vervolgens gecombineerd met het berekende traject. Zo is van iedere uitgezonden puls bekend wat de positie en de stand van het vliegtuig was. De uitgezonden puls wordt gereflecteerd op het aardoppervlak en vervolgens wordt het full wave form signaal terugontvangen en gedigitaliseerd opgeslagen. Soms reflecteert het signaal enkel op het aardoppervlak, soms reflecteert hij eerst in vegetatie en uiteindelijk op het aardoppervlak. Het ontvangen signaal ziet er bijvoorbeeld uit zoals het rode signaal in onderstaande figuur (rechts).

https://opals.geo.tuwien.ac.at/html/stable/fwf-als-principle_small.jpg 30-09-2019
{kind=link}
Van ieder signaal moet dus bepaald worden welke echo’s relevant zijn. De looptijd van het signaal tot de echo bepaalt de afstand vanaf het vliegtuig. In combinatie met de positie en stand van het vliegtuig op het moment van versturen van de puls levert vervolgens de coördinaten van het gemeten punt. Aan ieder punt worden vervolgens een aantal karakteristieken meegegeven die in een later stadium relevant kunnen zijn voor het gebruik van de data. Dit zijn o.a.:
- X,Y,Z
- Intensiteit
- Return nummer, totaal aantal returns
- Scan hoek
- Vliegstrook
- Tijdstip
Resultaat van deze stap is een globaal geogerefereerde puntenwolk met bijbehorende data per punt. Nu moet deze puntenwolk nog geometrisch gecorrigeerd worden.
3.3 Kalibratie
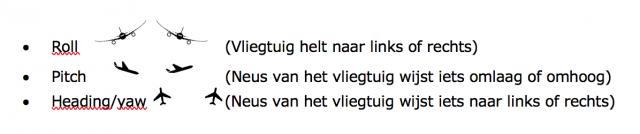
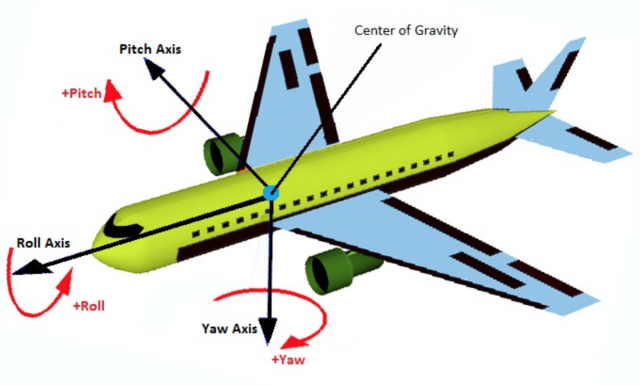
De puntenwolken zijn per vliegstrook opgeslagen. De vliegstroken overlappen elkaar meestal ergens tussen de 20 en 35%. Deze overlap wordt gebruikt om de data goed op elkaar aan te sluiten, immers, een huis in de ene vliegstrook moet op dezelfde plek liggen als datzelfde huis in de andere vliegstrook. Het goed op elkaar aansluiten van deze vliegstroken noemen we kalibreren. De kalibratie van de data gebeurt meestal eerst per vlucht en vervolgens worden alle vluchten samengevoegd en wordt gecontroleerd of de vluchten op elkaar aansluiten. Voor de kalibratie van de data wordt in principe aan drie parameters gedraaid:
Bij een perfect gekalibreerde dataset vallen de zadeldaken in de overlappende delen van de dataset exact op elkaar zoals is te zien in onderstaande figuur. Het effect van het draaien aan deze parameters op de data kan als volgt worden gevisualiseerd.
http://elektromot.com/wp-content/uploads/2017/11/1-1.jpg
Bij een perfect gekalibreerde dataset vallen de zadeldaken in de overlappende delen van de dataset exact op elkaar zoals is te zien in onderstaande figuur. Het effect van het draaien aan deze parameters op de data kan als volgt worden gevisualiseerd.

In een niet perfect gekalibreerde dataset is dat dus niet het geval. De kunst is nu om aan de afwijkingen van de zadeldaken te zien aan welke parameter gedraaid moet worden om de data geometrisch te verbeteren. Hieronder is gevisualiseerd welke patronen typisch zijn voor een restfout in de verschillende kalibratie parameters.
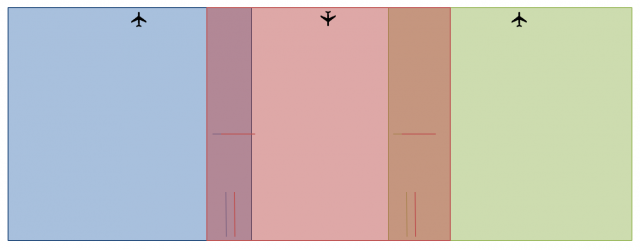
Bovenaanzicht vliegstroken, blauw en groen zijn in dezelfde richting gevlogen, rood in tegengestelde richting. Verder representeren de lijnen de zadeldaken die parallel en loodrecht op de vliegrichting gesitueerd zijn. In deze ideale situatie liggen de zadeldaken van de overlappende vliegstroken precies over elkaar.
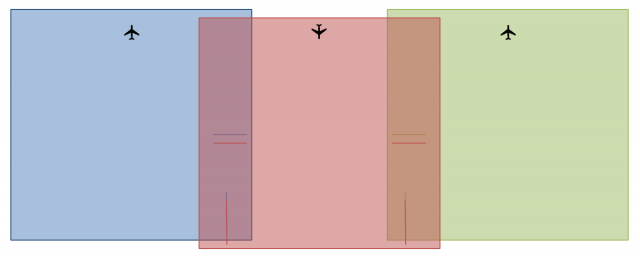
Als er nog een afwijking in de roll parameter zit dan uit zich dat als volgt in de data.
De roll uit zich van bovenaf gezien in een verschuiving van de vliegstroken naar links of rechts gezien vanuit de vliegrichting. Doordat stroken vaak tegengesteld gevlogen worden uit zich dit in een afwijking tussen de zadeldaken parallel aan de vliegrichting.
Als er nog een afwijking in de pitch parameter zit uit zich dat als volgt in de data.
De pitch uit zich van bovenaf gezien in een verschuiving van de vliegstroken naar voren of achteren gezien vanuit de vliegrichting. Doordat stroken vaak tegengesteld gevlogen worden uit zich dit in een afwijking tussen de zadeldaken loodrecht op de vliegrichting.
Als er nog een afwijking in de heading parameter zit uit zich dat als volgt in de data.
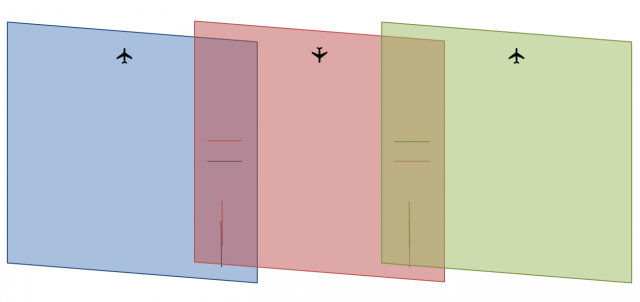
De heading uit zich van bovenaf gezien in een verschuiving van de vliegstroken naar voren aan de ene kant van het vliegtuig en naar achteren aan de andere kant van het vliegtuig, het is eigenlijk een verdraaiing van de vliegstrook. Doordat stroken vaak tegengesteld gevlogen worden uit zich dit in een afwijking tussen de zadeldaken loodrecht op de vliegrichting, maar anders dan bij de pitch verschuiven de zadeldaken aan beide zijden van de strook in tegengestelde richting.
Tegenwoordig worden overigens veelal de noklijnen van de zadeldaken uit de LiDAR puntenwolken gedestilleerd en wordt er, in combinatie met het gevlogen traject, automatisch een oplossing bepaald voor de kalibratieparameters.
3.4 Shiften
Als de kalibratie is afgerond is de horizontale of XY-positie van de data goed. Vervolgens wordt naar de hoogte van de data gekeken. Ook hier wordt gebruik gemaakt van de overlap tussen de vliegstroken. Op maaiveldniveau wordt een gemiddeld verschil berekend tussen de hoogte van de ene strook en de andere strook. Dit wordt gedaan voor alle strookoverlappen binnen een project. Doordat er ook dwarsstroken worden gevlogen ontstaat overtalligheid en dus controle om de hoogteverschillen betrouwbaar te vereffenen. Er wordt een vereffening uitgevoerd waarbij in de eerste fase de relatieve hoogteverschillen worden vereffend zodat het gemeten gebied als geheel goed op elkaar aansluit. In een tweede fase wordt het hele projectgebied zo goed mogelijk aangesloten op de gemeten referentievelden. Dit zijn velden (meestal asfalt, verharding, kunstgrasvelden, etc.) van ongeveer 5x5 meter die landmeetkundig zijn ingemeten en waarvan de coördinaten in NAP een stuk nauwkeuriger zijn dan de LiDAR metingen. Deze zijn vaak gewaterpast (3-10 mm nauwkeurigheid) of met GPS ingemeten (2-3 cm nauwkeurigheid).
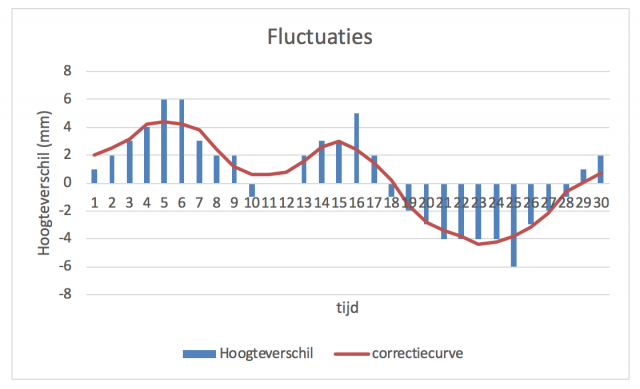
3.5 Fluctuaties
Het kan zijn dat er in de lengterichting van de vliegstrook nog wat minimale hoogteschommelingen zitten. Deze kunnen opgelost worden door de vliegstrook op te knippen in stukjes van een bepaalde tijdseenheid en voor die stukjes de hoogteverschillen met de overlappende stroken te berekenen. Zodoende krijg je een heleboel hoogteverschillen in de tijd. De software schat daar de beste curve doorheen om deze verschillen te minimaliseren en past deze vervolgens toe op de data.